1.摘要 
用剪视频的方式调整机器人动捕数据,小白也能直接上手玩转机器人。体验链接: https://k-h-huang.github.io/Motion_Editor/ 。开源地址:GitHub - K-h-Huang/Motion_Editor · GitHub
2.背景
在近段时间对机器人的开发过程中,发现人类动捕数据重定向到机器人上后,可能出现一些问题,比如某些帧的关节定向错误,导致动作不正常。因为能够可视化地去调整机器人的动作数据会是一个非常重要的工具,尽管的一些工具(如blender)可以实现,但是对于初学者来说学习成本高,因此可以实现一个简易的网站对动作数据进行调整。
3.如何实现
对于这个具有复杂功能的需求,需要对每个功能进行详细的说明,以便ai能够理解并作出合适的改动,一点一点构建出理想的功能,同时可以借助版本控制功能,以便在修改的方向不合心意时进行版本回退。
4.成果展示
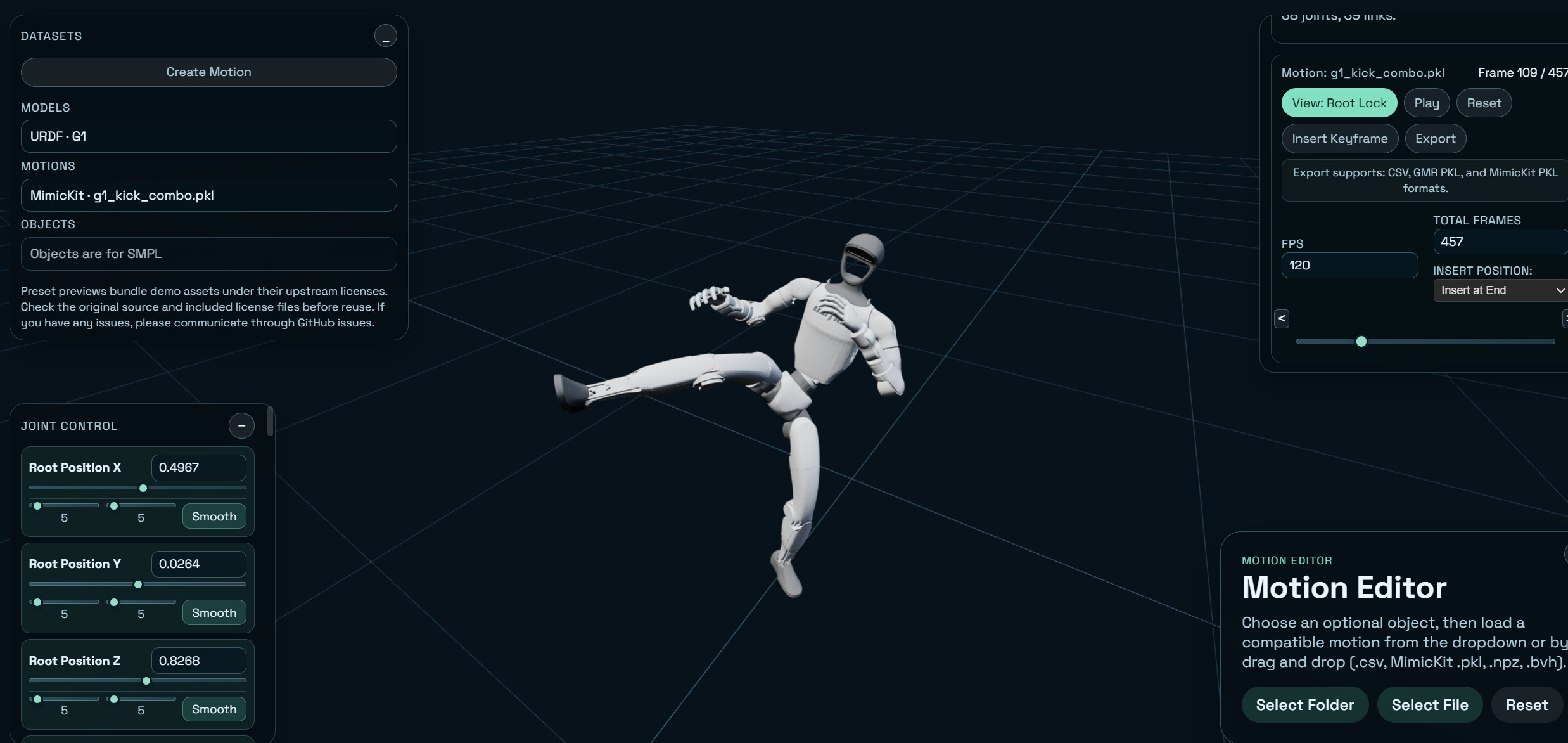
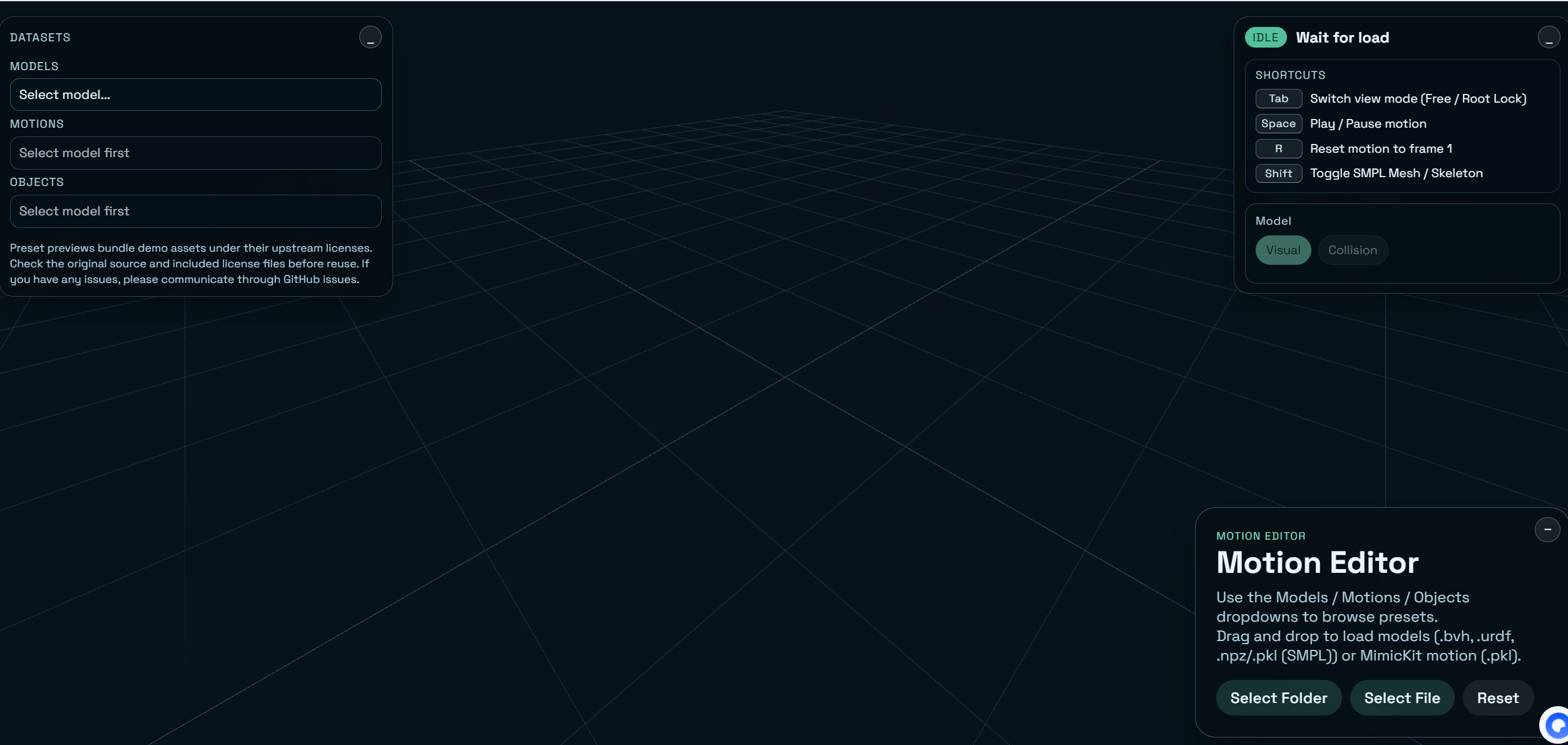
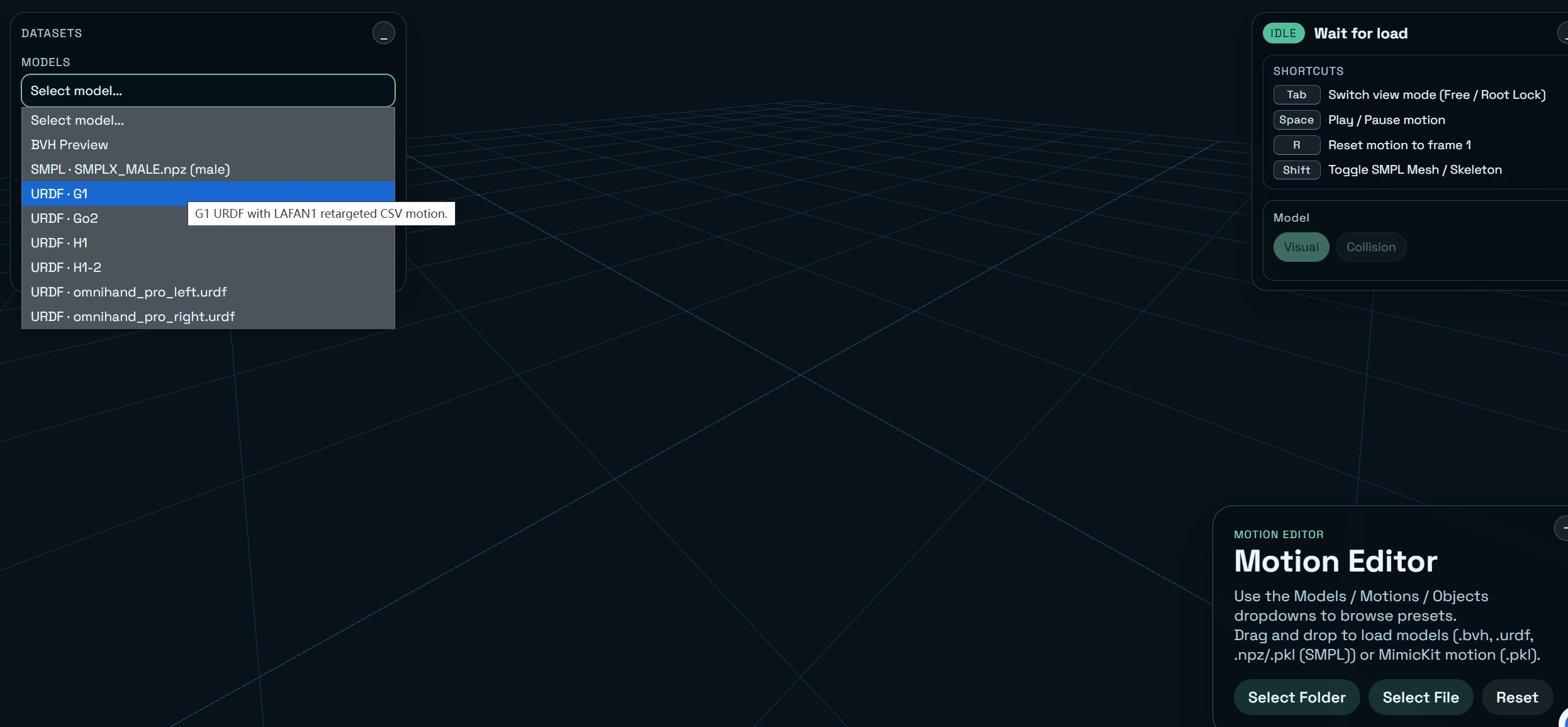
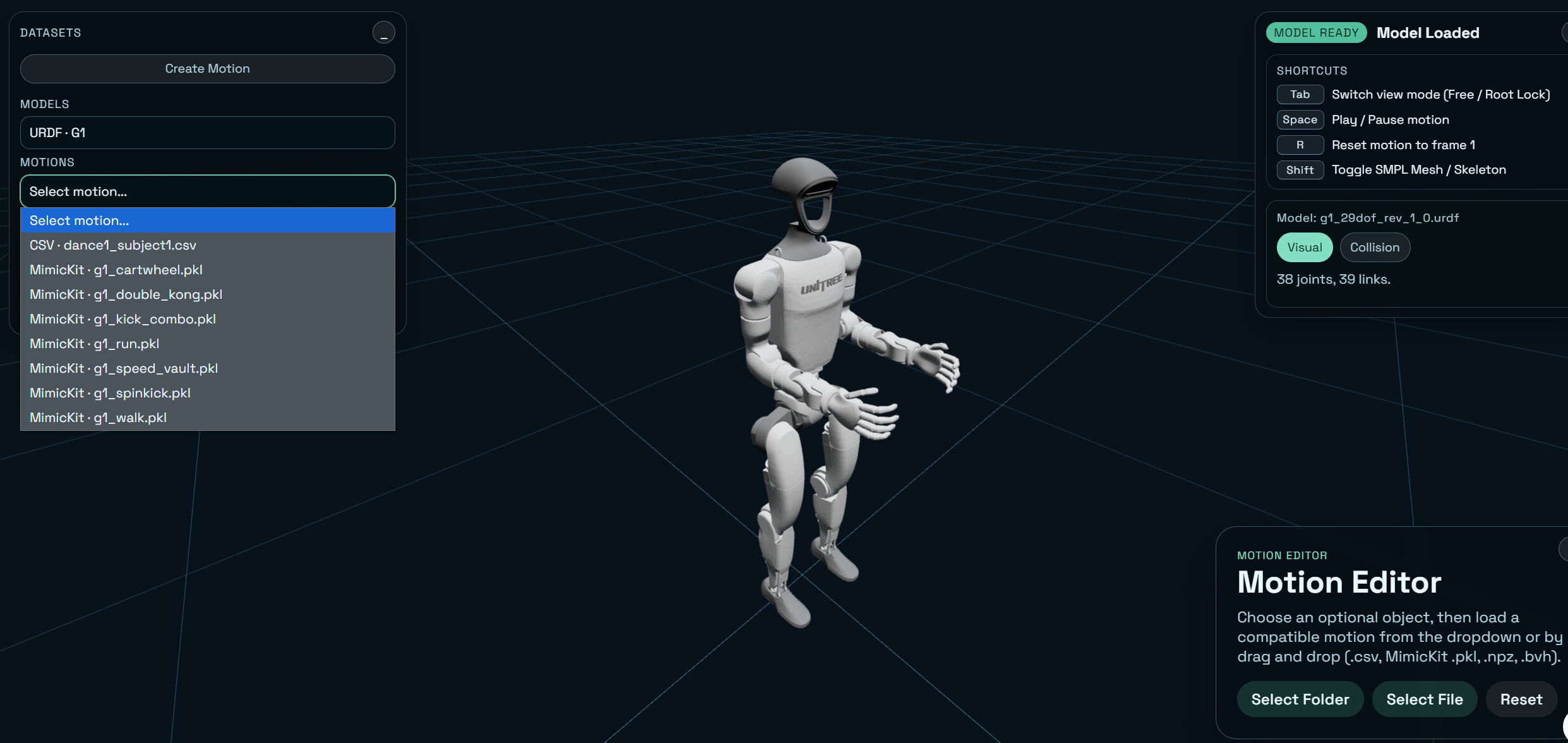
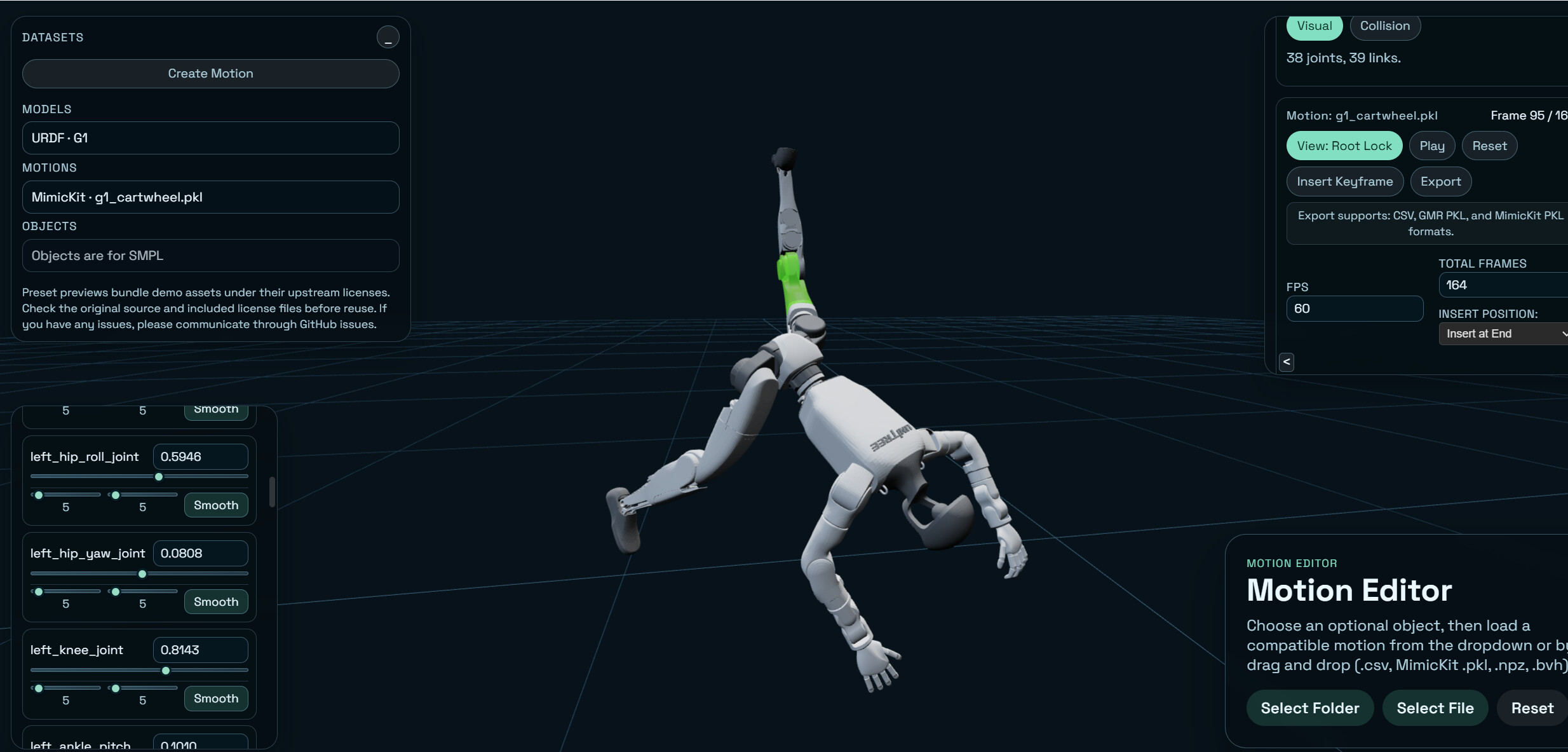
按照下图操作顺序:1.选择机器人型号 2. 选择动作数据 3浏览播放动作的机器人模型 4.按需修改各个关节参数
5.效果与总结
我借助 AI 完成了整座机器人动作数据可视化与编辑网站的全部开发工作,从页面布局、功能逻辑、数据渲染到交互编辑模块,全程依靠 AI 辅助落地。AI 极大压缩了开发周期,帮我省去自学前端、调试代码、踩技术坑的大量时间,整体开发效率提升非常明显。在整个搭建流程里,我只需要清晰说出功能需求、产品想法和使用场景,由 AI 承接代码编写、问题修改、功能迭代等落地工作。同时也沉淀出了一套可复用的协作方式:明确场景需求、分模块拆解功能、针对性提出修改调整、反复打磨交互与视觉效果,这套模式可以复用在后续工具开发、功能迭代与同类项目搭建中,让非开发人员也能快速落地专属工具产品。