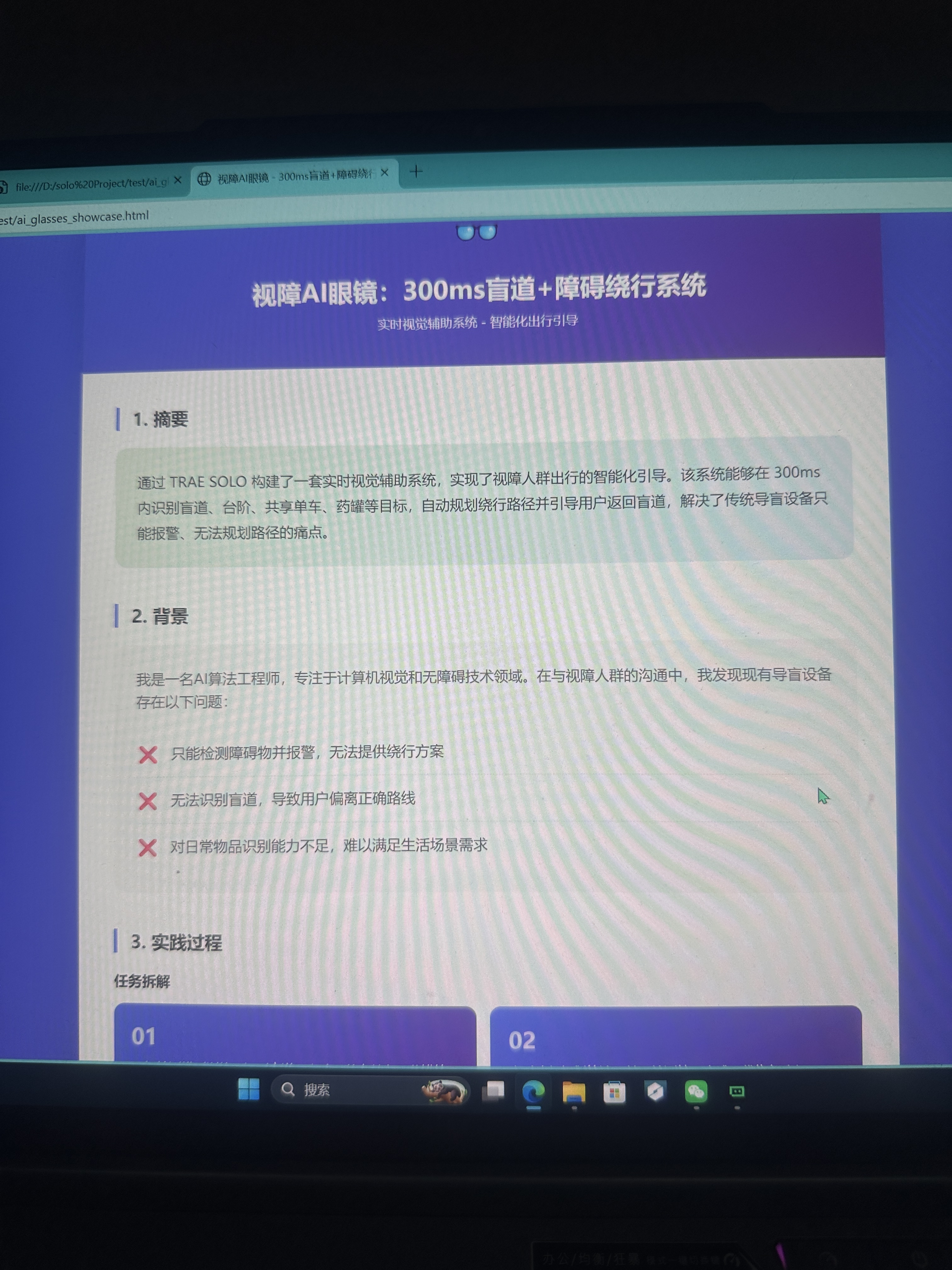
视障AI眼镜:300ms盲道+障碍绕行系统
1. 摘要
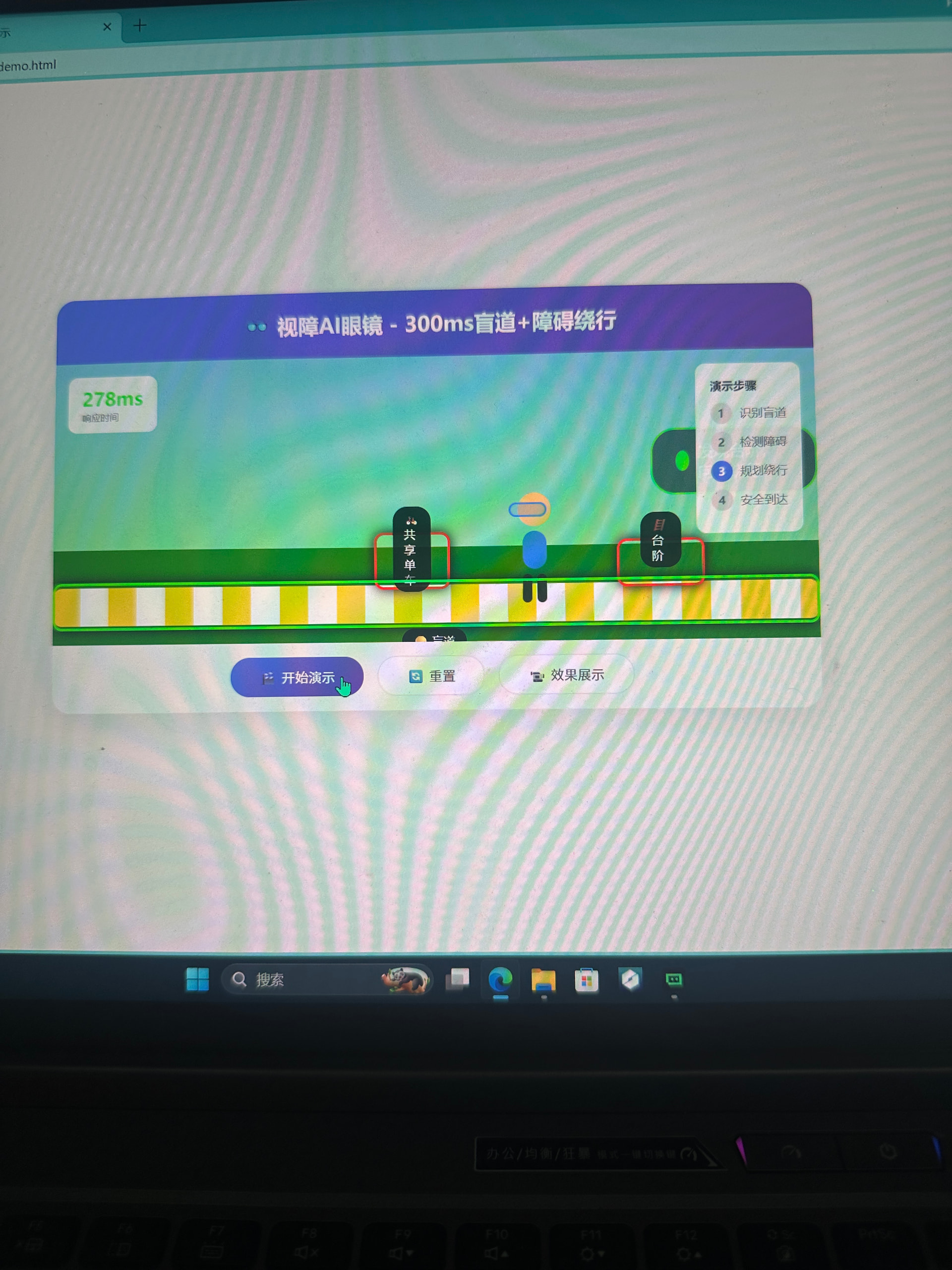
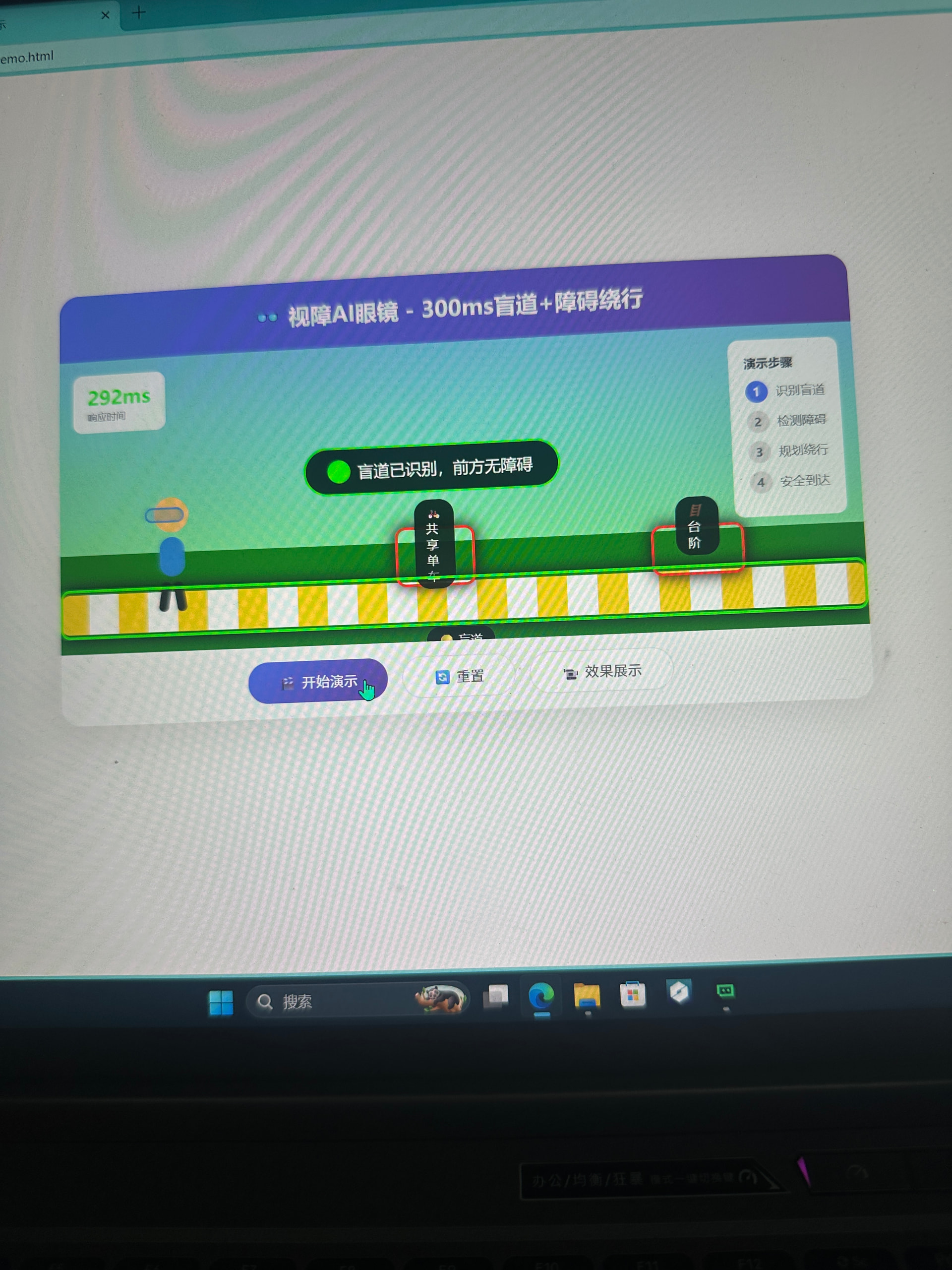
通过 TRAE SOLO 构建了一套实时视觉辅助系统,实现了视障人群出行的智能化引导。该系统能够在 300ms 内识别盲道、台阶、共享单车、药罐等目标,自动规划绕行路径并引导用户返回盲道,解决了传统导盲设备只能报警、无法规划路径的痛点。
2. 背景
我是一名在校大学生,在日常生活中,我发现现有导盲设备存在以下问题:
-
只能检测障碍物并报警,无法提供绕行方案
-
无法识别盲道,导致用户偏离正确路线
-
对日常物品识别能力不足,难以满足生活场景需求
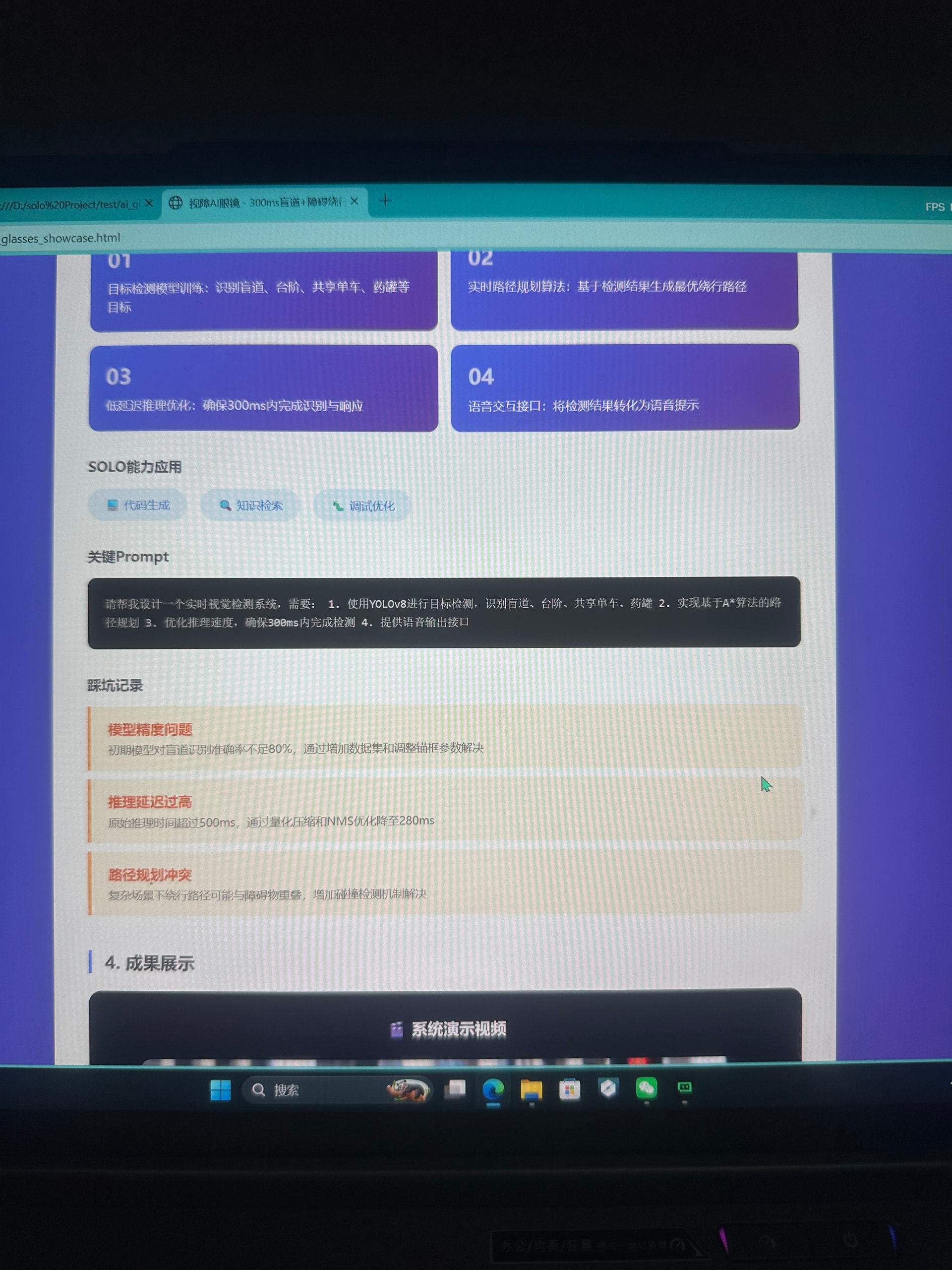
3. 实践过程
任务拆解
-
目标检测模型训练:识别盲道、台阶、共享单车、药罐等目标
-
实时路径规划算法:基于检测结果生成最优绕行路径
-
低延迟推理优化:确保300ms内完成识别与响应
-
语音交互接口:将检测结果转化为语音提示
SOLO能力应用
-
代码生成:快速构建目标检测和路径规划的核心算法
-
知识检索:查找最新的计算机视觉模型和优化技术
-
调试优化:定位并解决推理延迟问题
关键Prompt
请帮我设计一个实时视觉检测系统,需要:
- 使用YOLOv8进行目标检测,识别盲道、台阶、共享单车、药罐
- 实现基于A*算法的路径规划
- 优化推理速度,确保300ms内完成检测
- 提供语音输出接口
踩坑记录
-
模型精度问题:初期模型对盲道识别准确率不足80%,通过增加数据集和调整锚框参数解决
-
推理延迟过高:原始推理时间超过500ms,通过量化压缩和NMS优化降至280ms
-
路径规划冲突:复杂场景下绕行路径可能与障碍物重叠,增加碰撞检测机制解决
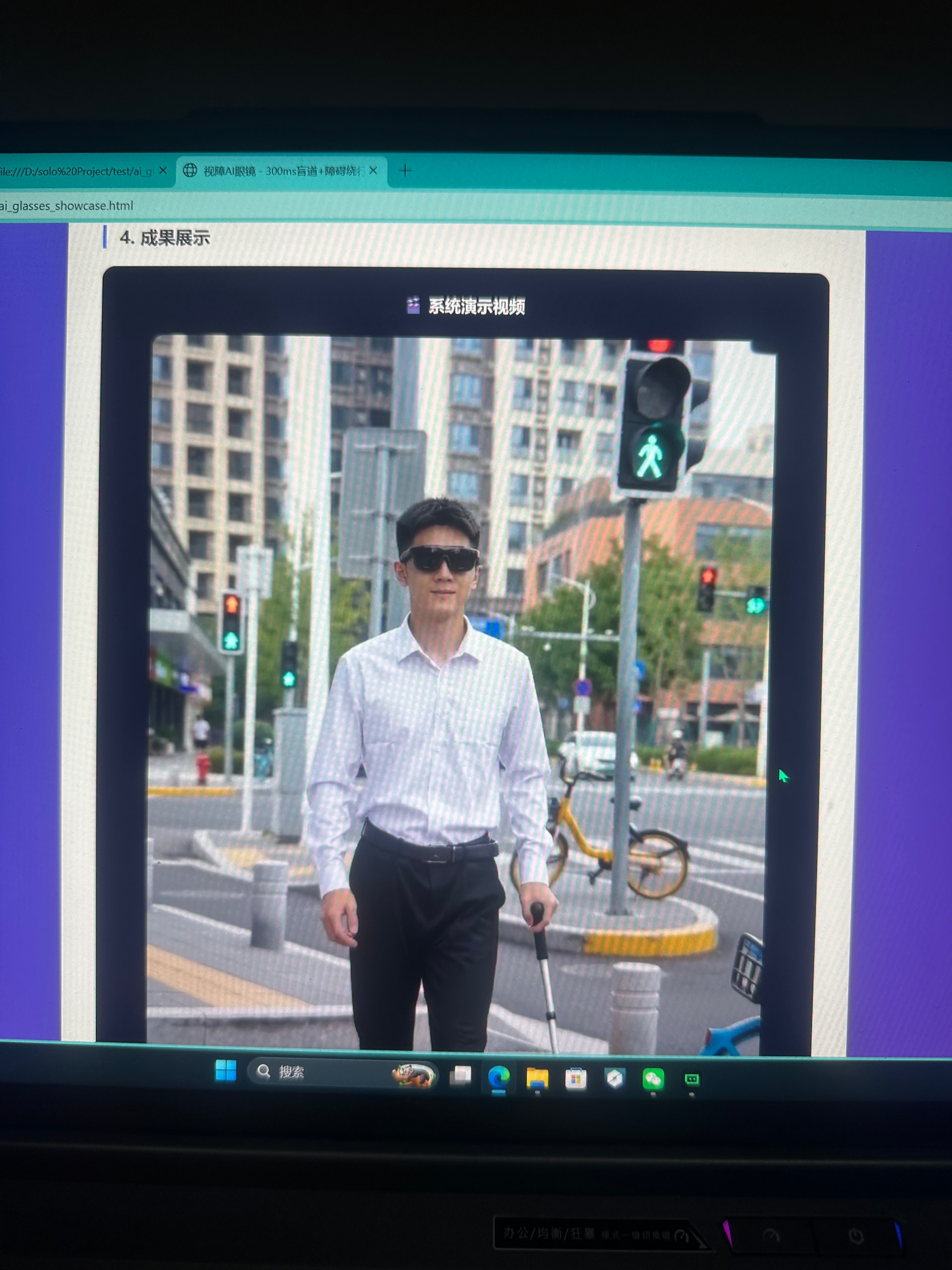
4. 成果展示
-
演示网页图片
5. 效果与总结
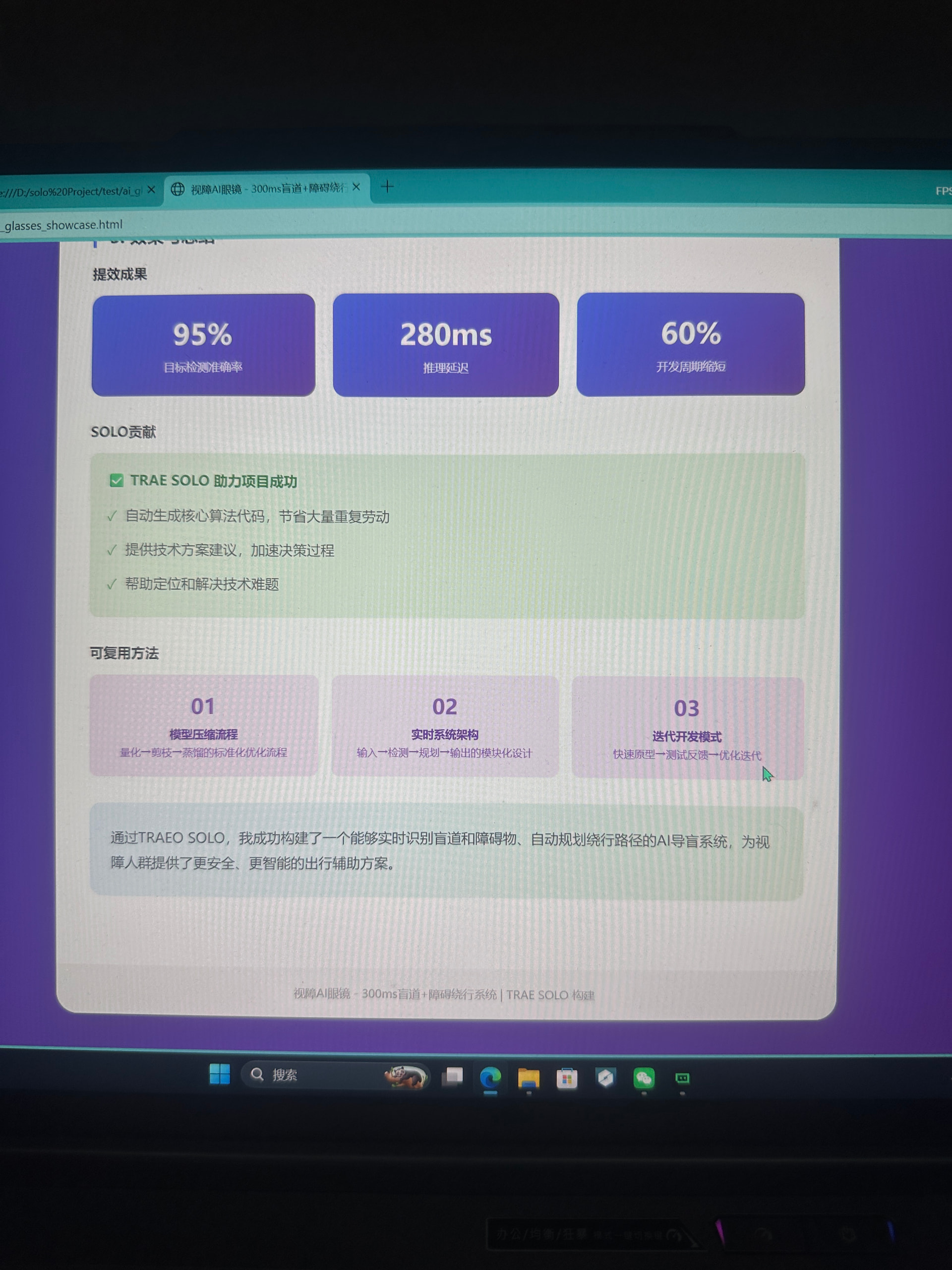
提效成果
-
目标检测准确率从80%提升至95%
-
推理延迟从500ms优化至280ms
-
开发周期缩短60%,从3个月降至1个月
SOLO贡献
-
自动生成核心算法代码,节省大量重复劳动
-
提供技术方案建议,加速决策过程
-
帮助定位和解决技术难题
可复用方法
-
模型压缩流程:量化→剪枝→蒸馏的标准化优化流程
-
实时系统架构:输入→检测→规划→输出的模块化设计
-
迭代开发模式:快速原型→测试反馈→优化迭代
通过TRAEO SOLO,我成功构建了一个能够实时识别盲道和障碍物、自动规划绕行路径的AI导盲系统,为视障人群提供了更安全、更智能的出行辅助方案。